
Software
Dataflow
Dit is mijn dataflow. Hierin kun je zien welke weg de data aflegt.

- HIGH of LOW wordt doorgegeven aan de Arduino, afhankelijk van of de knop is ingedrukt of niet.
- De weerstandswaarde wordt doorgegeven aan de Arduino.
- Dan geeft de Arduino deze informatie door aan de bluetooth module.
- Deze bluetooth module stuurt de informatie over bluetooth naar de Raspberry Pi.
- De Raspberry Pi stuurt verwerkt deze data en stuurt de motoren op de auto aan.
- De snelheid waaraan de auto rijd wordt door de Hall sensor gemeten.
- Ten slotte stuurt de Raspberry Pi deze data door naar de laptop over WiFi. Deze zal op Unity dan het dashboard laten zien met juiste bijhorende parameters.
Flowchart
In dit deel kun je mijn flowchart vinden. Deze is onderverdeeld in twee delen: het deel van de Arduino naar de auto en het deel van de auto naar het dashboard.


Eerst is er invoer van de potentiometer, deze waarde zal gebruikt worden om te beslissen of de auto naar links of naar rechts moet draaien. Daarna wordt er gekeken of er een knop is ingedrukt. Zo ja? Dan zal er gelezen worden welke knop wordt ingedrukt: de knop om vooruit te rijden of de knop om achteruit te rijden? Deze twee waarden worden over bluetoothnaar de Raspberry Pi gestuurd, eerst zal deze de waarde van de potentiometer verkrijgen en daarna de waarde van de drukknoppen. Op basis van die twee waarden zal hij de auto aansturen.
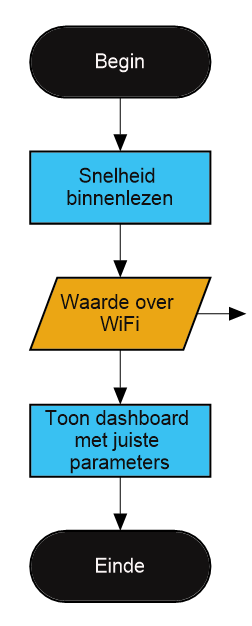
In deze tweede flowchart zal de data van de auto naar het dashboard gaan. Eerst wordt de snelheid binnengelezen. Deze waarde wordt dan over WiFi naar een laptop verstuurd. Deze laptop verkrijgt de snelheid en toont het dashboard met de juiste parameters.